Theorems for Computing Inertia Matrix \(\left[I\right]\)#
There are three useful theorems to compute moments of inertia. They are:
Rotation theorem
Parallel axis theorem (or translation theorem)
Composite theorem
Let us examine them in further detail.
Rotation theorem#
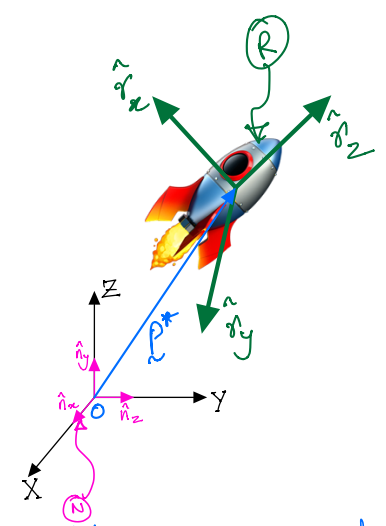
\(X-Y-Z\) make up a cartesian coordinate system.
\(O\) is the origin.
\(\hat{\bf n}_x,\;\hat{\bf n}_y,\;\hat{\bf n}_z\) are unit vectors directed along \(X-Y-Z\) respectively. The unit vectos represent a reference frame \(N\).
Also, the figure shows a rocket which has a reference frame \(R\) attached to it. You are given the inertia matrix of the rocket \(R\) about \(O\) along the unit vectors of frame \(N\).
Naturally, the rocket’s reference frame (\(R\)) also has three mutually orthogonal unit vectors: \(\hat{\bf r}_x\), \(\hat{\bf r}_y\), and \(\hat{\bf r}_z\). So, we can define another inertia matrix for \(R\) about \(O\) along the newly introduced rotating reference frame’s unit vectors \(\hat{\bf r}_x, \; \hat{\bf r}_y, \; \hat{\bf r}_z\). This matrix and its elements are:
Important
We begin by assuming that \(R\) is a particle of mass, \(m_R\). Then, let us consider a product of inertia from each matrix.
and
\({\bf p}^*\) is a position vector from \(O\) to the origin of the frame \(R\). We know from our discussion on direction cosine matrices that the unit vectors of \(R\) can be related to the unit vectors of \(N\) as:
\({}^R\begin{bmatrix}C\end{bmatrix}^N\) is the direction cosine matrix of \(N\) in \(R\). It is a \(3\times3\) matrix, which we shall assume has the following elements:
So, we can now easily derive:
After substituting Equation (31) in Equation (28) and some algebraic manipulation (show in handwriting below), we can rewrite the product of inertia \(J^{R/O}_{xy}\) in its matrix form (shown both in handwriting and as typed Equation (32)).
By performing this process for each of the inertia scalars, it can be shown that:
where \(({}^R\begin{bmatrix}C\end{bmatrix}^N)^T\) is the transpose of the DCM of N in R. Equation (33) is known the `Rotation Theorem for computing inertia matrix’.
Parallel axes theorem#
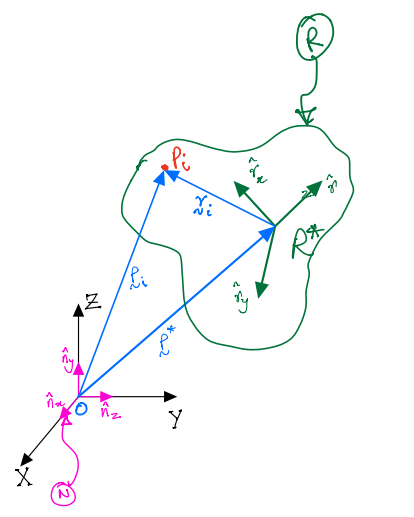
In the previous section we presumed that the rocket was a point mass. What happens if this assumption is relaxed and rockets are better approximated as a system of particles?
\({\bf p}^*\) is a position vector from \(O\) to \(R^*\) (the origin of the frame \(R\) and also the mass center of the rocket).
\({\bf p}_i\) is a position vector from \(O\) to \({P}_i\), the \(i^{\text{th}}\) particle on the rocket body.
\({\bf r}_i\) is a position vector from \(R^*\) to \(P_i\). So,
Now, we know that the product of inertia for this system of particles along the \(\hat{n}_x,\;\hat{n}_y,\;\hat{n}_z\) directions given by:
Upon substituting Equation (34) into Equation (35) and performing algebraic manipulations, we get:
The first term on the RHS of Equation (36) is, in fact, the inertia of \(R^*\) about \(O\). Similarly, the second term on the RHS of Equation (36) is the moment of inertia of \(R\) about \(R\)^*$. Thus, we can rewrite Equation (36) as:
where, \(I^{R/R^*}_{xy}\) is the product of inertia of \(R\) about the mass center \(R^*\). \(I^{R^*/O}_{xy}\)is the product of inertia of \(R^*\) about \(O\).
This result extrapolates to the moment of inertia scalars. For example,
and, more generally, to the inertia matrix:
Important
This rule to compute the inertia matrix about some point \(O\) is only valid when only we use the mass center as an intermediate transfer point.
Composite theorem#
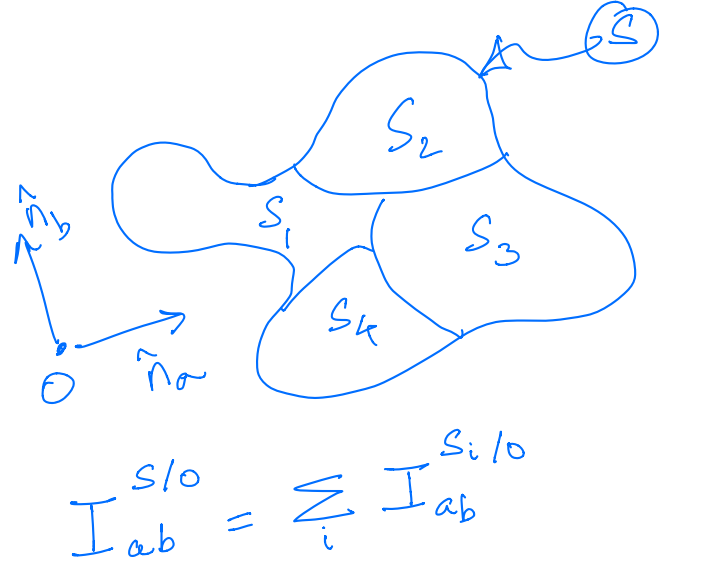
If \(S\) is a system comprising many smaller systems from the set \({S_1, S_2, ..., S_n}\), the composite theorem to compute an inertia scalar states that: