Mass/Inertia Scalars#
Mass: the quanity of matter within a given body. The units of measurement are: \(kg\), \(lb\).
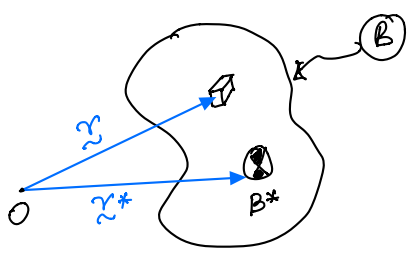
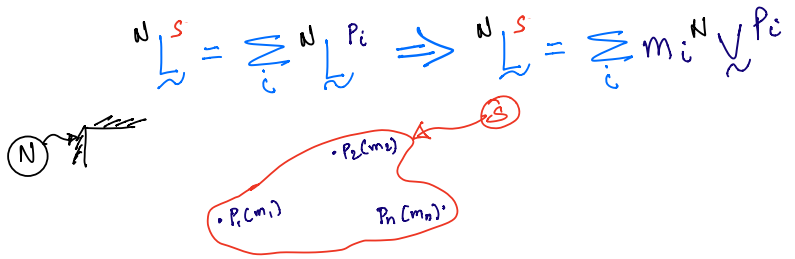
Mass center: consider a set of particles as shown below which together make up the system of particles \(S\):
The \(i^{\text{th}}\) particle has a mass \(m_i\)
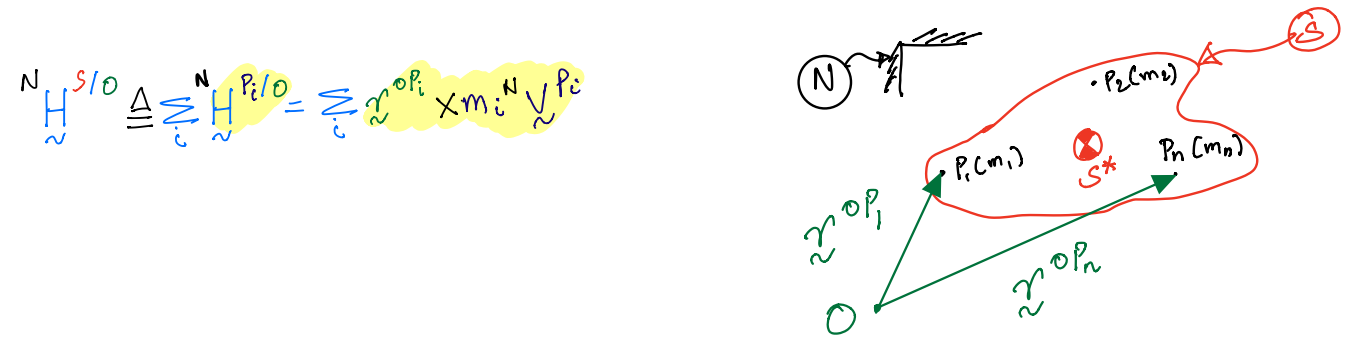
\(S^*\) is a fictitious particle such that:
This fictitious particle is called mass center. The mass center can be located by introducing a indipendant point seperate to the body.
\({\bf r}^*\); position vector from \(O\) to \(S^*\)
\({\bf q}_n\); position vector from \(O\) to \(P_n\)
So, the position vector to locate the \(n^{th}\) particle is:
Thus, expanding 8.1:
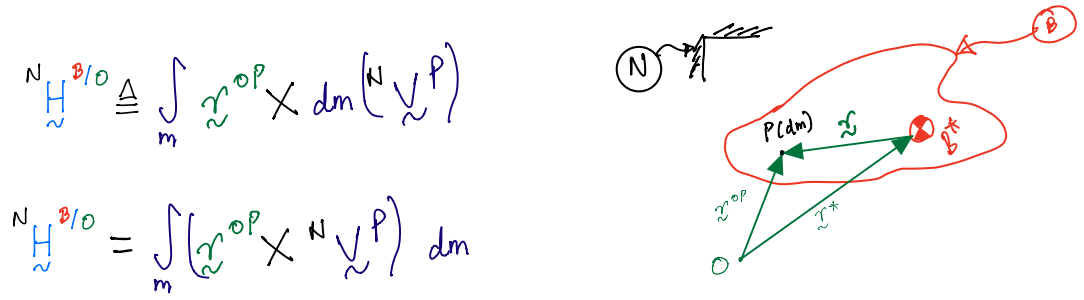
For a continuum:
where, \(\mathrm{d}m\) is elemental mass that can be obtained from density \(\rho\) and elementary volume \(\mathrm{d}V\).
Composite theorem for mass centre#
where,
\(r^*_i\) is the position vector locating the mass centre of \(S_i\), the \(i^{\text{th}}\) system of particles.
\(m_{s_{i}}\) is the mass of \(i^{\text{th}}\) system.
\(r^*\) is the mass centre of the composite system \(S\).
Example #1#
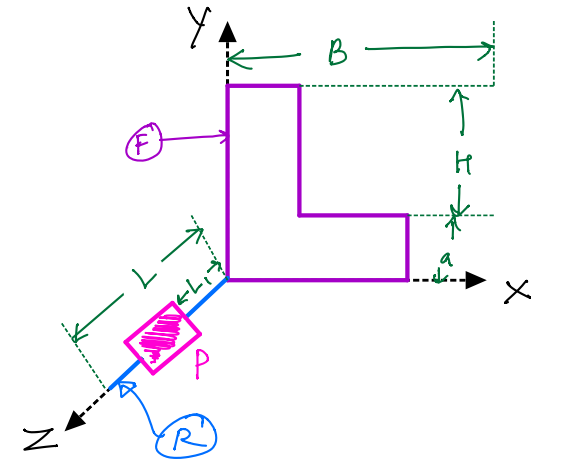
Given:
\(F\) and \(R\) are the bodies of mass density \(\rho\; kgm^{-2}\) and \(\sigma\;kgm^{-1}\) respectively.
\(P\) is a particle of mass \(m\).
Find:
Mass centre of the combined system.
Example #2#
\(F\) is split into two: \(F_1\) and \(F_2\).
\(m_{F_{1}}\) = \(\rho H_a\), is mass of \(F_1\).
\(m_{F_{2}}\) = \(\rho B_a\), is mass of \(F_2\).
Also,
\(m_{R}\) = \(\sigma L\), is mass of \(R\).
Then,
Similarly,
and
Inertia scalar#
For a particle \(P\) of mass \(m\), we can define a parameter called the inertia scalar. This is defined relative to an arbitrary point \(O\). There are two such inertia scalars:
1. Product of inertia#
Notation#
\(I^{P/O}_{ab}\) is the product of inertia of \(P\) along two lines through point \(O\) that are parallel to unit vectors \(\hat{\bf n}_a\) and \(\hat{\bf n}_b\).
8.5 can be extended for both systems of particles and continua.
Product of inertia of system particles#
Product of inertia of continua#
Warning
In all cases, \(I_{ab} = I_{ba}\) because the formula relies on the dot product of vectors.
2. Moment of inertia#
Notation#
\(I^{P/O}_{aa}\) is the moment of inertia of P about a line through point \(O\) which is parallel to the unit vector \(\hat{\bf n}_a\).
8.8 can be extended to both systems of particles and continua.
Moment of inertia of system of particles#
Moment of inertia of a continua#
Example#

\(P\) is a particle of mass \(m\).
\(\hat{\bf n}_x,\;\hat{\bf n}_y,\;\hat{\bf n}_z\) are unit vectors that are mutually orthogonal.
\({\bf r} = x\hat{\bf n}_x + y\hat{\bf n}_y + z\hat{\bf n}_z\)
Find:
Solution
From inertia scalars to inertia matrix#
From the previous example, we now have some insight that we will be interested in computing the moments of inertia and products of inertia about a set of unit vectors that make up a reference frame.
For this discussion, we assume that the unit vectors are: \(\hat{\bf n}_x,\;\hat{\bf n}_y,\;\hat{\bf n}_z\).
The inertia scalars can be used to define a square matrix called the inertia matrix.
Notation:
\(\left[I\right]^{S/O}\) is the inertia matrix of \(S\), a system of particles about the point \(O\).
The diagonal elements of this matrix are the moments of inertia.
The off-diagonal elements are the products of inertia.
So, the inertia matrix is represented as:
Warning
In all cases, \(I_{ab} = I_{ba}\) because the formula relies on the dot product of vectors.
Rigid body/ continua: The inertia scalars of a rigid body can also be arranged into an inertia matrix.